
SORA-Q ist ein Ball, kann aber Räder, Kamera und einen Schwanz ausklappen und autonom Erkunden
Design von japanischem Mini-Rover wurde von Transformer-Spielzeug inspiriert
Auf den ersten Blick könnte man SORA-Q für ein Spielzeug halten. Pokémon-Fans könnte der silberne Ball an einen Pokéball erinnern, mit dem die kleinen Monster in der TV-Serie und im Spiel gefangen werden. Tatsächlich handelt es sich aber um einen innovativen Rover, der die Mondoberfläche erkunden kann.
Der Rover hat einen Durchmesser von 8 Zentimetern und wiegt nur 250 Gramm. Auf dem Mond gelandet ist er im Rahmen der SLIM-Mission (Japanese Smart Lander for Investigating Moon) im Jahr 2024. Dort bewegte er sich fast 2 Stunden lang autonom. In einer neuen Studie im Fachmagazin Science Robotics wird diese Mission jetzt aufgearbeitet.
➤ Mehr lesen: Japans Mondlander SLIM landet auf dem Mond
Eine der größten Herausforderungen war es dabei, einen so kleinen Roboter über staubiges, unebenes Terrain zu navigieren. Räder bleiben dort leicht stecken. Zudem musste der Roboter in der Lage sein, selbstständig Entscheidungen zu treffen. Die Elektronik, die dafür verbaut ist, muss allerdings winzig sein und schränkt die Rechenleistung damit auch ein.
Transformers dienten als Inspiration
Entwickelt wurde SORA-Q, offiziell als „LEV-2“ bezeichnet, von der japanischen Weltraumagentur JAXA zusammen mit Sony, der Universität Doshisha und dem Spielzeughersteller Takara TOMY entwickelt. Dessen berühmtesten Produkte sind Beyblade-Kreisel, hatte aber auch die Rechte für Pokémon- und Transformers-Spielzeuge. Deren Erfindungen für Spielzeuge, die sich in Autos umbauen lassen, lieferten die Basis für SORA-Q.
Wie die Transformers und Zoids von Takara TOMY lässt sich SORA-Q von einem extrem kompakten Ball in ein zweirädriges Erkundungsfahrzeug verwandeln. Die beiden äußeren Halbschalen trennen sich und der Rover wird zum Zylinder. Die Schalen funktionieren dann wie Räder. Sie drehen sich aber unabhängig voneinander und eiern absichtlich. So kann sich der Rover durch das Regolith, also den Mondstaub, nach vorn schieben, falls die Räder durchdrehen. Auch ein kleiner Schwanz wird ausgeklappt, der den Rover zusätzlich stabilisiert.
Zweiter Rover schickt Bilder zur Erde
Außerdem werden 2 Kameras ausgeklappt, mit denen die Umgebung dokumentiert wird. Die Aufnahmen wurden dabei nicht direkt zur Erde geschickt, da das zusätzliche Rechenleistung und Energie frisst. Um die interne Batterie zu schonen, wurden die Bilder auf dem Mond an einen zweiten Rover gesendet, LEV-1, der die Informationen an Mission Control weiterleitete. LEV-1 hat keine Räder, sondern hüpft über die Mondoberfläche.
➤ Mehr lesen: Kleine Roboter sind die Helden der gescheiterten Mondmission SLIM
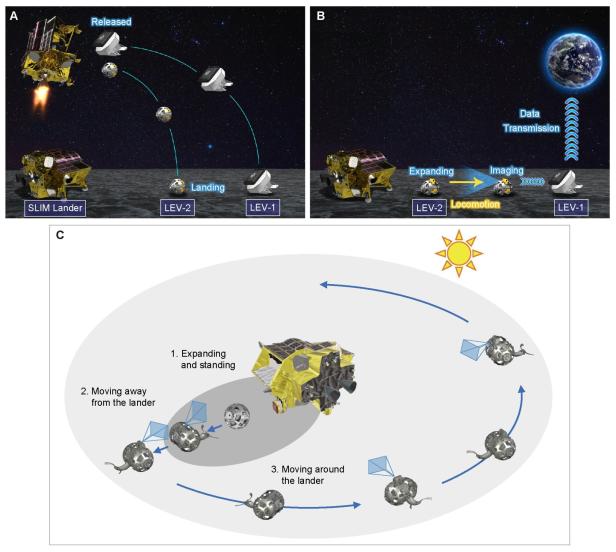
LEV-1 und LEV-2 sind mit dem SLIM-Lander auf dem Mond gelandet. Während LEV-2 (SORA-Q) umhergefahren ist, blieb LEV-1 stationär und übermittelte die Daten an Mission Control
© D. Hirano
In ihrem Paper zeigen sich die Forscher mit der Mission zufrieden. „LEV-2 [...] hat autonome Erkundung auf der Mondoberfläche gemeistert, indem er um den SLIM-Lander navigierte, Bilder des SLIM-Landers und seiner Umgebung aufgenommen hat und diese Bilder übermittelte [...] ohne auf bodengestützte Fernsteuerung angewiesen zu sein“.

Die Aufnahme des umgekippten SLIM-Landers stammt von LEV-2 aka SORA-Q
© JAXA/TOMY/Sony Group Corporation/Doshisha University
Nach 108 Minuten verloren die Forscher die Verbindung zum Rover. Eigentlich hatte man gehofft, 20 bis 30 Minuten länger verbunden zu bleiben. Grund dafür ist entweder ein Defekt beim Bewegungsmechanismus von LEV-1 oder eine zu schnell verbrauchte Batterieladung. Bis dahin übermittelte er aber wichtige, hochauflösende Fotos. „Die Studie demonstrierte, dass autonome Oberflächenoperationen mit extrem kompakten Roboterplattformen durchgeführt werden können“, heißt es in der Studie.
Kommentare