
Natürliche Bewegungen mit künstlicher Hand
Dieser Artikel ist älter als ein Jahr!
Menschen, die bei einem Unfall einen Arm verloren haben, können heute oft mit einem relativ guten Ersatz für ihre Extremität rechnen. So genannte myoelektrische Prothesen erkennen die Aktivität noch vorhandener Muskel und setzen diese mit Motoren in Bewegungen um. Künstliche Hände können so mit viel Übung gut benutzt werden. Eine Bewegungsachse folgt dabei der anderen. Dazwischen muss umgeschalten werden. In Zukunft sollen Armprothesen leichter gesteuert werden können. Die Prothese soll sich an den Träger anpassen, aus seinen Muskelsignalen lernen und diese in fließende Bewegungen umsetzen.
Mustererkennung lautet das Zauberwort, das Prothesenanwendern künftig Operationen und lange Gewöhnungsphasen ersparen und so das Leben erleichtern soll. Im Technologiezentrum des Gesundheitstechnik-Unternehmens Ottobock in Wien wird daran gearbeitet, diese Mustererkennung serienreif zu machen und sowohl Software als auch Hardware dafür zu optimieren.
Um zu verstehen, was genau mit Mustererkennung verbessert wird, muss man sich zunächst ansehen, welche unterschiedliche Prothesen für armamputierte Personen heute existieren.
© Bild: Ottobock
© Bild: Ottobock
© Bild: Ottobock
© Bild: Ottobock
© Bild: Ottobock
Prothesen-Gegenwart
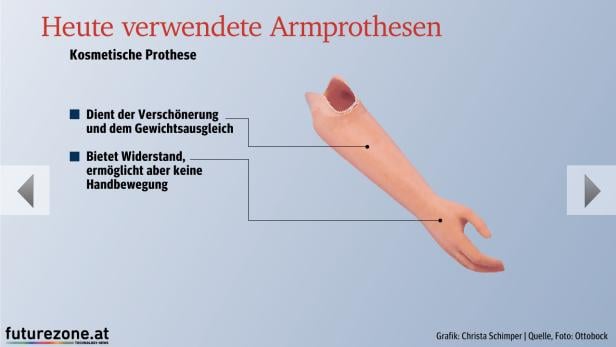
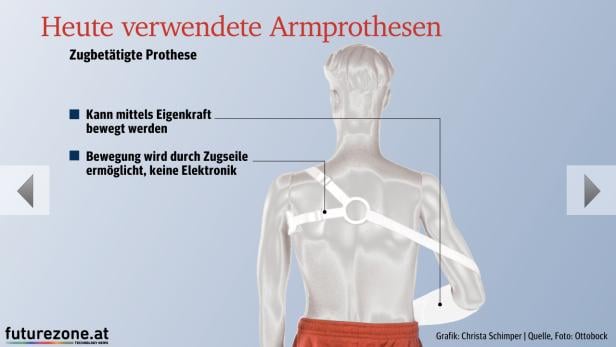
Zunächst wäre da die kosmetische Prothese. Sie kann nicht viel mehr außer den verlorenen Arm in Form und Gewicht zu ersetzen. Um einfache Bewegungen auszuführen, benötigt man schon zumindest eine zugbetätigte Prothese. Bei dieser können Bewegungen durch noch vorhandene Muskeln und Seilzüge rein mechanisch vollbracht werden.
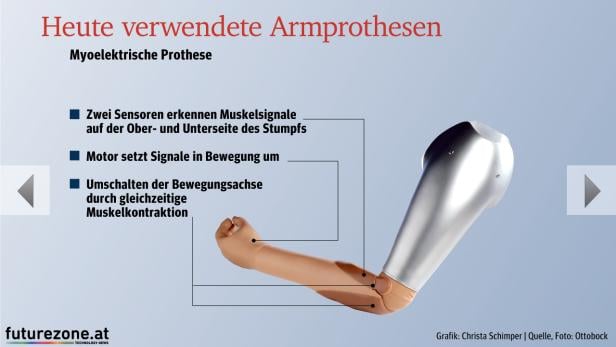
Eine Stufe fortschrittlicher ist die myoelektrische Prothese. Bei Hand-Amputierten messen zwei Sensoren an der Ober- und Unterseite des Unterarmstumpfs die Signale von Muskelregungen und wandeln diese mittels kleiner Elektromotoren in Bewegung um. So kann etwa eine künstliche Hand geöffnet und geschlossen werden. Will man die Hand rotieren, kann mittels gleichzeitiger Muskel-Anspannung umgeschalten die Achse umgeschalten werden.
Damit ist es etwa möglich, die Hand du drehen, auf und ab zu bewegen, einen Gegenstand mit den Fingerspitzen von Daumen und Zeifefinger zu fassen (Pinzettengriff) oder einen Schlüssel zu halten (Schlüsselgriff). Erfordert eine Tätigkeit die Bewegung um mehrere Achsen, ist dies nur schrittweise möglich. Um die einzelnen Achsen-Modi und Bewegungsrichtungen richtig einzusetzen, muss der Prothesenträger üben und lernen.
Armnerven auf der Brust
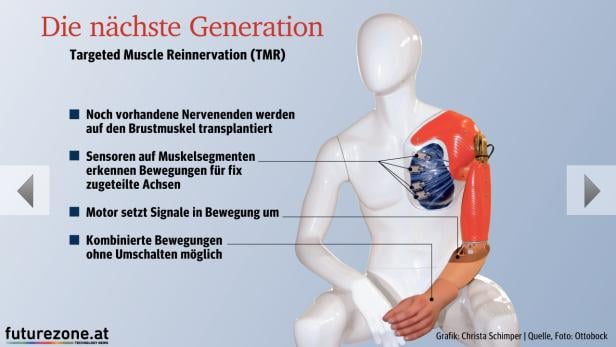
Mit der nächsten Prothesengeneration sollen Bewegungen kombinierbar werden. Sie sollen intuitiv und fließend ausgeführt werden können. Eine mögliche Methode dabei ist die sogenannte Targeted Muscle Reinnervation (TMR). Dabei werden Nervenenden, die vormals in den Arm führten, auf einen Muskel transplantiert, der seine Funktion nach der Amputation verloren hat. Wird beispielsweise ein ganzer Arm abgetrennt, enden die Armnerven in den einzelnen Segmenten des Brustmuskels.
Versucht der Patient, seinen nicht mehr vorhandenen Arm zu bewegen - den Phantomarm - werden seine Brustmuskeln aktiviert. Eine myoelektrische Prothese mit Sensoren über den Brustmuskelsegmenten erkennt diese Signale und setzt sie motorisch in Bewegung um. TMR wird seit 2012 an Patienten angewendet und kommt vor allem bei hohen Armamputationen zum Einsatz. Voraussetzung ist eine aufwändige Operation.
Lernfähige
Prothese
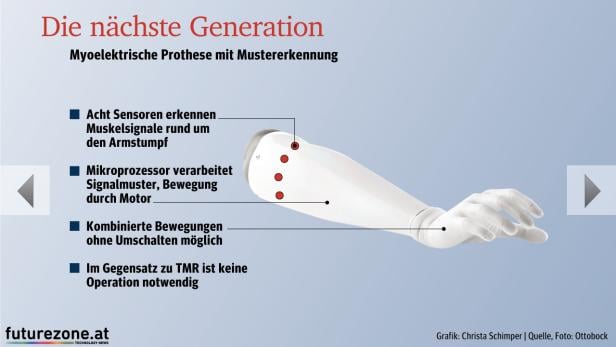
Bei der Mustererkennung bedarf es keiner vorhergehenden Operation. Die Prothese wird wie eine normale myoelektrische Prothese getragen. Die Unterschiede dazu: Statt zwei Sensoren an der Ober- und Unterseite des Armstumpfes umschließt eine Manschette aus acht Sensoren den Rest-Arm. Die Bordelektronik weist zudem mehr Rechenkapazität auf. Nach dem Anlegen der Prothese durchläuft der Anwender zunächst ein Kalibrierungsprogramm.
Die Prothese wird mit dem Computer verbunden und führt den Anwender in mehreren Schritten durch dieses Programm. Mit seiner Phantomhand führt er dabei verschiedenste Bewegungen durch, die ihm von der Software vorgegeben werden, etwa einen Pinzettengriff. Die jeweilige Muskelaktivität im Arm wird dabei aufgezeichnet. Während verschiedenste Phantombewegungen durchgeführt wurden, lernt das Programm, die dabei auftretenden Signalmuster zu unterscheiden. Am Ende wird die Prothese mit diesen Daten gefüttert, die Anwendung kann beginnen.
Herausfordernde Platzierung
Das Kalibrierungstraining in Verbindung mit dem Computer soll in Zukunft alleine mit der Prothese möglich sein. Noch wird daran geforscht, wie die Muskelsignale bestmöglich erkannt und unterschieden werden können. Eine Herausforderung stellt beispielsweise die Platzierung des Prothesenschafts samt der Sensormanschette dar. Letztere muss bei jedem Anlegen der Prothese auf der immer gleichen Stelle auf der Haut anliegen, ansonsten ist die Signalerkennung beeinträchtigt.
Eine Möglichkeit, dieses Problem zu beseitigen, seien implantierte Elektroden, erklärt Christian Hofer, Leiter des Mustererkennungs-Projekts bei Ottobock. In seinem Unternehmen werde jedoch weiterhin an einer nicht-invasiven Lösung gesucht.

© Ottobock
Energiemanagement
Ein anderes Problem ist die in der Prothese vorhandene Rechenkapazität in Kombination mit dem Energiemanagement. Smartphone-Prozessoren wären beispielsweise leistungsfähig genug, verbrauchen aber zu viel Strom.
Die in der Prothese verbauten Akkus müssen großteils die Motoren beliefern, die die Bewegungen des Arms bzw. der Hand ausführen. Schlussendlich soll ja auch genügend Leistung dahinterstecken. Aktuelle myoelektrische Prothesen führen etwa einen Pinzettengriff mit einem Druck von 7 Kilogramm pro Quadratzentimeter aus. Ein Schlüssel kann mit einem Druck von 5 kg/cm² gehalten werden. Eine Prothese soll keine Gegenstände fallen lassen.
Dennoch muss der Akku einer Prothese mindestens einen Tag lang durchhalten. 95 Prozent der darin gespeicherten Energie wird für die Motoren eingesetzt, nur fünf Prozent gehen an den Prozessor. Dieser erreicht derzeit nur etwa ein Zehntel der Rechenleistung eines Smartphone-Prozessors, verbraucht aber auch wesentlich weniger Strom. Doch die Energiespar-Qualitäten von Handychips werden ständig verbessert. Ein künftiger Einsatz in einer Prothese erscheint möglich. "Der Fortschritt spiel uns in die Hand", meint Hofer doppeldeutig.
Hohe Erwartungen
Der hohen Erwartungshaltung bezüglich einer einfacheren, intuitiveren Prothesensteuerung, versuchen die Forscher im Wiener Technologiezentrum gerecht zu werden. Beim Umgang mit der Mustererkennungs-Prothese zeigen sich allerdings gewisse individuelle Unterschiede. Generell gilt: "Menschen mit mehr Körpergefühl haben es auch bei der Bedienung einer Prothese leichter. Etwa Sportler", sagt Hofer.
Bis zur Markteinführung einer myoelektrischen Prothese mit Mustererkennung könnten noch einige Jahre vergehen. Zunächst muss noch weiter geforscht werden, dann muss die Prothese für die Produktion angepasst werden, dann folgt ein langwieriger Zulassungsprozess. Erst wenn dieser abgeschlossen ist, kommt es zur Produktion. Gefragt nach seiner Einschätzung, wann die ersten Prothesen mit Mustererkennung auf den Markt kommen, meint Hofer vorsichtig: "Frühestens 2016."
- Computer-Tisch hilft bei Schlaganfall-Therapie
- Mit Licht und Farbe gegen Angst im Spital
- "Biologische und digitale Welt verschmelzen"

Wir würden hier gerne ein ActiveCampaign Widget zeigen. Leider haben Sie uns hierfür keine Zustimmung gegeben. Wenn Sie diesen anzeigen wollen, stimmen sie bitte ActiveCampaign zu.

Wir würden hier gerne einen Outbrain Feed zeigen. Leider haben Sie uns hierfür keine Zustimmung gegeben. Wenn Sie diesen anzeigen wollen, stimmen sie bitte Outbrain UK Ltd zu.
Kommentare