
"Roboterschwärme können komplexe Probleme lösen"
Dieser Artikel ist älter als ein Jahr!
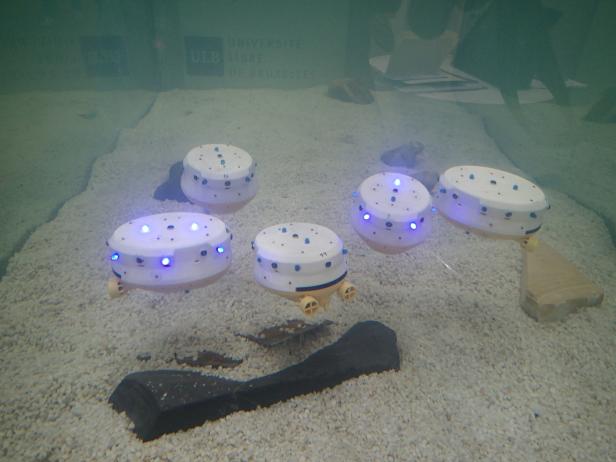
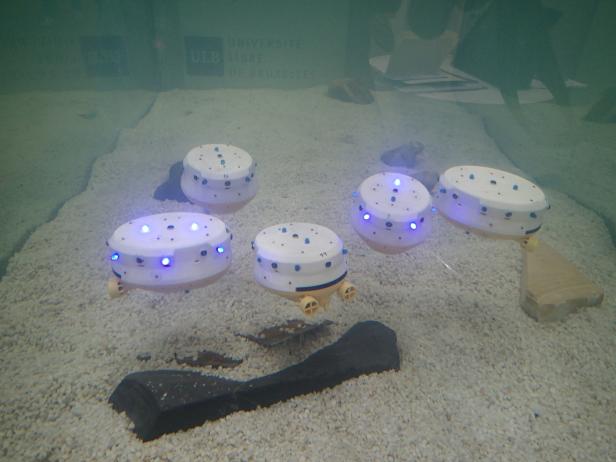
Forscher der Universität Graz haben mit Kollegen von Hochschulen in Stuttgart, York, Sant’ Anna und Brüssel den weltweit ersten autonomen Schwarm aus Unterwasserrobotern entwickelt. Die futurezone konnte sich auf der Cebit in Hannover live davon überzeugen, dass die Mini-Maschinen bereits gemeinsam Aufgaben lösen können. In einem großen Aquarium demonstrieren die Forscher ihre Forschungsergebnisse, indem sie einen Schwarm aus einigen Mini-U-Booten nach einem im Sand am Boden des Tanks verborgenen Magneten suchen lassen. “Wir haben schon mehrere Algorithmen für verschiedene Aufgaben, das Such-Programm eignet sich besonders gut für Demonstrationen”, sagt Christoph Möslinger von der Uni Graz im futurezone Gespräch.
© Bild: futurezone
© Bild: futurezone
© Bild: futurezone

© Bild: futurezone
© Bild: futurezone

© Bild: futurezone
© Bild: futurzone

© Bild: futurezone

© Bild: futurezone
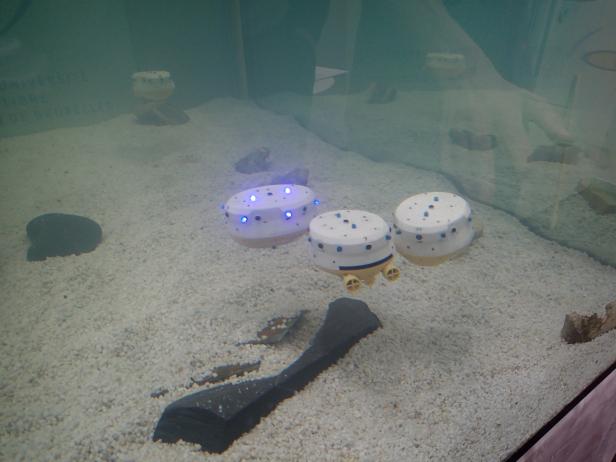
Jeder der Roboter hat einen Kompass an Bord, mit dem der kräftige Magnet aufgespürt werden kann. Die kleinen Maschinen bewegen sich für sich zufällig durch das Aquarium. Findet eins der U-Boote den Magneten, signalisiert es das mithilfe an der Außenhaut befestigten Leuchtdioden. Andere Schwarmmitglieder, die das Signal registrieren, machen sich daraufhin ebenfalls zum Magneten auf und senden ihrerseits Lichtpulse aus. So kann der Schwarm völlig autonom und ohne aufwändige Kommunikation - die unter Wasser schwierig ist und zudem Energie verbraucht - untereinander die Suchmission erfolgreich zu Ende bringen. “Für sich genommen sind die Maschinen sehr einfach, trotzdem kann der Schwarm komplexe Aufgaben erledigen, ohne dass von außen steuernd eingegriffen wird”, erklärt Möslinger.
Tiere zeigen den Weg
Als Vorbild dient den Wissenschaftlern die Natur. Viele der Programme haben Vorbilder im Tierreich, weshalb das interdisziplinäre Projekt in Graz auch am Institut für Zoologie angesiedelt ist. “Wir können unsere U-Boote wie einen Vogelschwarm zusammenhalten und als Einheit bewegen. Von Glühwürmchen haben wir und die Synchronisation der Blinksignale abgeschaut. Je nach Größe des Schwarms ändert sich die Zeit, die nötig ist, bis alle Synchron blinken. So erhält jeder Roboter eine recht gute Schätzung über die Schwarmgröße, ohne dass untereinander kommuniziert werden muss. Emergentes Verhalten, bei dem aus einfachen Grundregeln ohne steuerndes Element komplexe Ergebnisse Prozesse entstehen, kommt in der Natur sehr häufig vor”, sagt Möslinger.
Das Interessante an der Arbeit der Grazer Wissenschaftler ist, dass sich ihre Algorithmen unabhängig von der Hardware implementieren lassen. So könnten etwa Roboter mit verschiedensten Sensoren und Werkzeugen mit der Software ausgestattet werden, die Pipelines reparieren, Umwelt- und Klimadaten erfassen oder Bootsrümpfe reinigen könnten. “Bei diesen Aufgaben ist ein Schwarm aus kleineren Robotern effizienter als ein einzelnes, großes Gerät. Das gilt auch für viele weitere Einsatzgebiete, das Potenzial ist sehr groß und es kommen immer wieder neue Ideen, an die bisher niemand gedacht hat.
Vielseitig einsetzbar
Ob es sich um fliegende oder tauchende Roboter handelt, ist für die Programme der Forscher ebenfalls unerheblich. “Quadrocopter könnten mit unseren Algorithmen ebenfalls zu einem Schwarm zusammengeschaltet werden”, so Möslinger. Die Größe des Schwarms ist dabei theoretisch nicht begrenzt. Wir sind in der Forschungsphase und haben nicht die Mittel, beliebig große Schwärme zu bauen, unser System ist aber theoretisch beliebig skalierbar”, so der Wissenschaftler der Uni-Graz. Für die Entwicklung der nötigen Algorithmen beschränken sich Möslinger und seine Kollegen auf den Einsatz im Wasser, weil er durch die eingeschränkten Kommunikationsmöglichkeiten ein anspruchsvolleres und interessanteres Umfeld bietet.
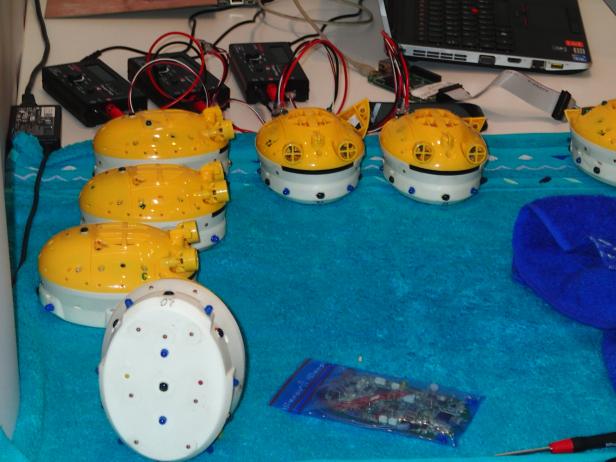
Umgebaute Kinderspielzeuge
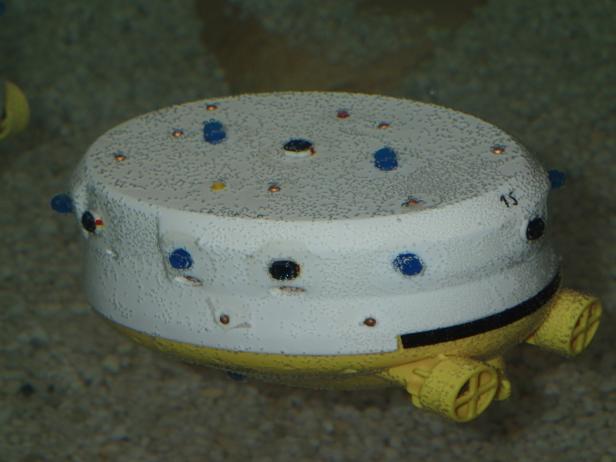
Die erste Generation der U-Boote ist sehr einfach, die Tauchtiefe ist auf ein bis zwei Meter beschränkt. “Es handelt sich um umgebaute Kinderspielzeuge. Zwei Cortex A9-Prozessoren, einige Sensoren und Dioden sind alles, was wir brauchen. Den zweiten Chip brauchen wir deswegen, weil einer allein zu wenige Input-Anschlüsse hätte. Die nächste Generation produzieren wir in 3D-Druckern selber, hier werden auch Lautsprecher und Mikrofone zum Senden von Pings eingebaut”, erzählt Möslinger.
Ende des Jahres soll ein Schwarm aus diesen neueren U-Booten im Hafen von Livorno erstmals im Meer getestet werden. Dann kommt auch die schwimmende Basisstation zum Einsatz, ein Katamaran mit Solarzellen, an dem die U-Boote ihre Akkus selbständig laden und Daten abliefern können. Über Pings wissen die U-Boote, wenn sie sich zu weit von der Basis entfernen und umkehren müssen. “Diesen Test heben wir uns für das Ende der aktuellen Forschungsphase auf, weil er mit Risiken für die Hardware verbunden ist. Es gibt aber bereits Nachfolgprojekte, schließlich gibt es auf diesem Gebiet noch viel zu tun”, so Möslinger.
Die futurezone berichtet live von der Cebit 2014 in Hannover. Die Reisekosten wurden von der futurezone GmbH selbst sowie von T-Systems übernommen.
Kommentare