
Wie fahrerlose Autos dank Laser besser sehen
Dieser Artikel ist älter als ein Jahr!
Wenn Menschen mit dem Auto fahren, verlassen sie sich hauptsächlich auf ihren Sehsinn. Was Augen in Kombination mit dem Hirn leisten, daran kommen Kameras und Prozessoren noch nicht heran. Bei der Entwicklung von selbstfahrenden Autos setzt man daher neben Kameras auch auf eine Reihe anderer Sensoren, um das Geschehen in der Umgebung des Fahrzeugs möglichst vollständig wahrzunehmen. Eine vielversprechende Technologie ist das Lidar. Der Name ist eine Mischung aus Licht und Radar. Grob gesagt, werden dabei Laserstrahlen ausgesandt und ihre Reflexionen wieder eingefangen. Aus der dabei verstrichenen Zeit kann man Abstände sehr präzise messen.
Ursprung in der Raumfahrt
Erstmals eingesetzt wurde Lidar in den 60er-Jahren in der Raumfahrt. Im Automobilbereich fand die Technologie erst in den 90er-Jahren Einzug. Damals tauchten erste Abstandsregeltempomaten mit Lidar auf. Mitte der 2000er-Jahre wurde Lidar erstmals in der Entwicklung selbstfahrender Autos verwendet. Im Zuge der ersten Wettbewerbe für Roboterfahrzeuge in den USA (DARPA Challenges) mauserte sich Lidar zu einem entscheidenden Erfolgsfaktor. Seither springen immer mehr Unternehmen auf den Lidar-Zug auf. Die Aussicht, in ferner Zukunft Millionen Fahrzeuge mit eigenen Sensoren auszustatten, beschleunigte die Weiterentwicklung. Heute gibt es weltweit rund 70 Unternehmen, die an Lidar-Lösungen basteln. Waren die Sensoren früher als große rotierende Trommeln auf dem Autodach klar erkennbar, gibt es heute viele Formen.
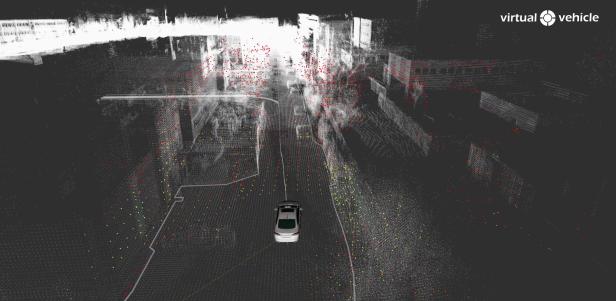
Ein Lidar sieht seine Umgebung als "Punktewolke"
© Virtual Vehicle
Schlüsseltechnologie gesucht
Welche davon sich in Zukunft als Schlüsseltechnologien vom Rest abheben werden, das will das Forschungsprojekt LiDcAR herausfinden. In dem von der Forschungsförderungsgesellschaft (FFG) finanzierten Projekt arbeiten Infineon, das Institut für Automatisierungs- und Regelungstechnik der TU Wien und das Grazer Forschungszentrum Virtual Vehicle zusammen. Mit einer Vielzahl an Tests und dem Bau eigener Prototypen will man langfristig den Weg zu einem erfolgreichen Lidar-Produkt aus Österreich ebnen.
"Lidar werden heute vor allem nach ihrem Scan-Mechanismus und nach der Art der Distanzmessung unterschieden", erklärt Marcus Hennecke, der Leiter der Abteilung Innovation and Funding Management von Infineon am Entwicklungszentrum Graz. Neben rotierenden Spiegeln, die Laserstrahlen ablenken (den oben erwähnten Trommeln) gelten heute so genannte MEMS-Spiegel als erfolgversprechend. Dabei wird die Richtung von Laserstrahlen durch winzige mikromechanische Bauteile in Chipgröße verändert. Ein anderer Ansatz ist das Flash-Lidar, bei dem die Umgebung wie mit einem Blitz ausgeleuchtet wird. Es wird also in allen Richtungen gleichzeitig gemessen. Das geht zwar schnell, aber die Reichweite ist beschränkt. Bei der Distanzmessung gibt es ebenfalls mehrere Möglichkeiten.
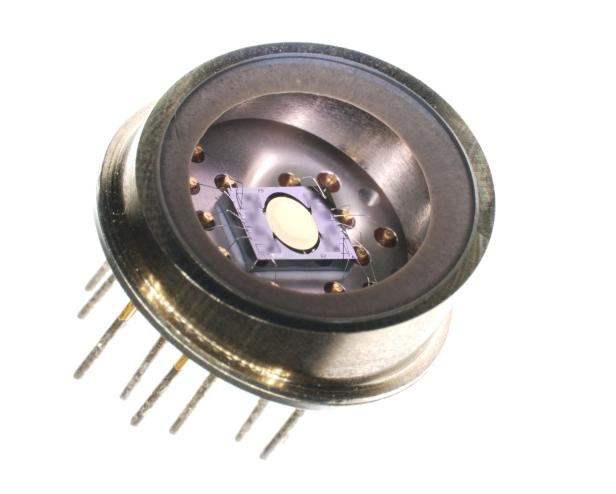
Mit MEMS-Spiegeln wird Laserlicht schnell, präzise und kostengünstig abgelenkt
© Infineon
Weg von universeller Lösung
Jede Variante hat je nach Einsatzzweck verschiedene Vor- und Nachteile. Hennecke: "Wenn man etwa auf der Autobahn den Abstand zum voraus fahrenden Fahrzeug messen will, braucht man Reichweiten um die 200 Meter. Will man Lidar auch zum Überholen einsetzen und quasi an Fahrzeugen vorbei schauen, benötigt man schon 300 bis 400 Meter. Dafür darf das Gesichtsfeld sehr klein sein. Will man das Auto in einer Garage selbstständig einparken lassen ("Valet Parking"), genügt eine sehr kurze Reichweite. Dafür muss das Lidar eine möglichst gute Rundumsicht, auch in die Höhe haben." Wie die Branche erst lernen musste, gebe es keine universelle Lösung für alle Szenarien, erklärt Hennecke. Stattdessen gelte es, mehr über potenzielle Anwendungsfälle zu verstehen und genau dafür geeignete Sensoren zu entwickeln.

Virtual Vehicle stellt die Testfahrzeuge, mit denen die Lidar-Varianten erprobt werden
© Virtual Vehicle
Kosten und Platzierung
Generell gelte es, Lidar kostengünstiger zu machen. Im Vergleich mit Kameras, Radar- oder Ultraschallsensoren gelten Lidar immer noch als relativ teuer. Der zunehmende Wegfall mechanischer Teile (hin zu einem sog. "Solid-State Lidar") und Miniaturisierung scheinen Erfolgsrezepte dafür. Eine weitere Herausforderung ist die Platzierung von Lidar am Fahrzeug. Die optischen Sensoren sind anfällig für Verunreinigungen. Insofern vielversprechend seien Lidar hinter der Windschutzscheibe oder im Scheinwerfer, die man per Scheibenwischer reinigen kann.
Im Zuge des Projekts LiDcAR ist auch die Konstruktion eigener Prototypen geplant. Diese sollen zunächst im optischen Messlabor der TU Wien getestet werden, dann aber auch im realen Einsatz, an Bord eines autonomen Testfahrzeugs von Virtual Vehicle. Unterwegs sein wird das Auto auf den Straßen der Testregion ALP.Lab in der Steiermark.

Stärken und Schwächen von Sensoren für selbstfahrende Autos
© KURIER/Solomon/Eber
Kombination sinnvoll
Bei allem Enthusiasmus für Lidar merkt Hennecke an, dass ein sensorischer Alleingang nicht zielführend ist. "Wir empfehlen auf jeden Fall die Fusion verschiedener Sensoren, am besten Kamera, Radar und Lidar." Nur durch die Kombination der technischen Datenerfassung könne man sicherstellen, dass selbstfahrende Autos gewisse Dinge im Straßenverkehr nicht fehlinterpretieren. Hennecke: "Ein Objekt zu detektieren, reicht nicht. Man muss seine Bewegung verfolgen und es klassifizieren. Dabei kann es zu Fehlern kommen." Ein Radarsensor erhält etwa ein starkes Echo von einer Coladose auf der Straße und hält diese möglicherweise für ein Hindernis. Durch Kamera und Bilderkennung kann diese Interpretation korrigiert werden.
Das "nächste große Ding" auf dem Weg zu einem vollautonomen Fahrzeug werde laut Hennecke wohl das "Valet Parking" sein. Die Passagiere steigen dabei aus und das Auto sucht sich selbstständig einen Parkplatz. Ab wann genau Autos komplett ohne menschliche Hilfe im Verkehr auskommen, dazu wagt der Forscher keine Prognose.
Diese Serie erscheint in redaktioneller Unabhängigkeit mit finanzieller Unterstützung der Österreichischen Forschungsförderungsgesellschaft (FFG).


Kommentare