
Roboter-Insekten sollen schwer zugängliche Umgebungen inspizieren
Dieser Artikel ist älter als ein Jahr!
Jeder hat wohl schon mal ein Insekt zuhause gefunden und sich gefragt, wie es denn überhaupt reingekommen ist. Aufgrund ihrer Größe sind für die oft unbemerkten Mitbewohner*innen die kleinsten Öffnungen ein Weg.
Genau diese Eigenschaft wollen Forscher der University of Pittsburgh nutzen und haben winzige, von Insekten inspirierte Roboter entwickelt. Sie sollen eingesetzt werden, um in enge Bereiche zu gelangen und dort Bildgebungs- oder Umweltuntersuchungen durchzuführen, Proben zu entnehmen und andere Tätigkeiten durchführen, die Menschen sonst verwehrt wären.
Insektenroboter
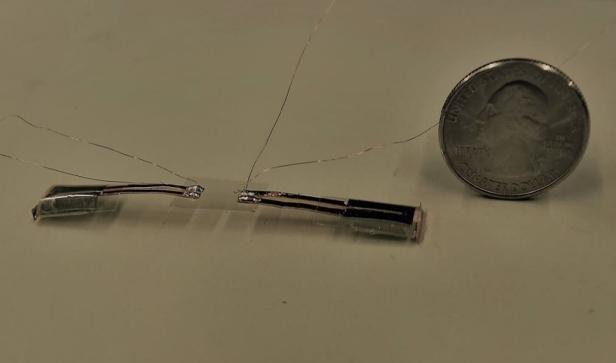
© Bild: University of Pittsburgh/Swanson School of Engineering

© Bild: University of Pittsburgh/Swanson School of Engineering
Wie M. Ravi Shankar, Professor für Wirtschaftsingenieurwesen, dessen Labor die Forschung leitete, gegenüber der futurezone erklärt, könnten sie sich in vielen Bereichen als nützlich erweisen. „Ich halte medizinische Anwendungen für eine spannende Möglichkeit. Es besteht das Potenzial für ungebundene oder ferngesteuerte, bildgebende oder chirurgische Geräte, die auf diesen Mikrorobotern basieren. Es könnte auch interessante Anwendungen bei der Katastrophenrettung oder vielleicht sogar bei der Hauspflege geben. Vielleicht könnten die Mikroroboter Rohre und Abflüsse inspizieren, um Lecks hinter Wänden zu finden.“
Die Roboter sind in etwa so groß wie eine Grille, aber man sei laut Ravi sehr gespannt auf die Möglichkeit, sie noch weiter zu verkleinern. „Ich glaube, dass der Millimeter-Maßstab durchaus in Reichweite ist.“
Energiegeladene Sprünge
Nicht nur die Größe stammt von Insekten, sondern auch ihre Form der Fortbewegung. „Forschungsarbeiten lieferten bahnbrechende Ergebnisse, die zeigen, dass das Springen auf kleinen Skalen effizienter ist als das Krabbeln. Das ist vielleicht der Grund, weshalb einige Insekten einen Wettbewerbsvorteil haben – etwa bei der Nahrungsaufnahme oder der Flucht vor Fressfeinden“, so Shankar.
Die künstlichen Polymermuskeln der kleinen Roboter werden „mit ein paar Volt elektrischer Spannung“ angetrieben. Die Gliedmaßen bauen dabei mechanische Energie auf und geben sie dann in einem Stoß ab. „Es ist vergleichbar mit dem Aufbau von Energie in einem Bogen, die dann in einem Stoß auf einen Pfeil übertragen wird und ihn vorwärts treibt. Wir haben die Gliedmaßen so gestaltet, dass sie gebogen sind und die Energie aufnehmen, wenn sie mit Strom versorgt werden“, sagt Shankar.

© University of Pittsburgh/Swanson School of Engineering
„Ihre Sprünge bewegen sich im Moment im Zentimeter-Maßstab. Das hängt natürlich von der Oberfläche ab, auf der sie sich bewegen. Es ist schwieriger, von losem Sand zu springen als von einer festen Oberfläche.“ Die vielseitige Bewegung und die leichte Struktur ermöglichen es den Robotern sich auf beweglichen Oberflächen wie Sand und sogar über Wasser zu hüpfen.
Aufbau der Robotermuskeln
„Als wir mit unseren Materialien experimentierten, stellten wir fest, dass die Herstellung in bestimmten Geometrien die Erzeugung eines impulsiven Kicks mit elektrischem Input ermöglichte,“ erklärt Shankar.
Dafür wurden Flüssigkristall-Elastomere (formfeste und elastisch verformbare Kunststoffe) genutzt, die eine neue Klasse künstlicher Muskeln darstellen. Die Forscher haben ihre Eigenschaften optimiert und sie in eine schalenähnliche antriebstechnische Baueinheit (Aktor) integriert, welche die impulsive Bewegung ermöglicht.
Die Studie wurde im Journal Advanced Materials Technologies veröffentlicht und von Junfeng Gao, Arul Clement, Mohsen Tabrizi und M. Ravi Shankar mitverfasst.



Kommentare